
0898-88888888
当前人类对岩质行星、卫星、小行星探测的兴趣日益增长,在这些天体上进行采样、地质考察、与地球环境的对比等任务都极具科学和战略价值,但地外天体复杂多样的地形(如崎岖山地、峡谷和深邃洞穴)给探测任务带来了巨大的挑战,因此亟需研制可实现稳定附着与灵活移动的多模态攀岩机器人。此外,攀岩机器人还可用于地质勘探、灾害救援、深海探测等任务。
传统的工业附着装置和攀爬机器人难以在山地岩石环境实现稳定附着和高效移动。面向此类环境,研究者们通常采用基于仿生爪刺(Bioinspiredmicrospine)的附着装置来为机器人提供攀附力,但此类附着装置还存在对岩石形状适应能力有限、脱附易失败、无法同时满足机器人的快速行走与攀爬需求等问题,而攀岩机器人也存在柔顺性不足、足端附着力缺乏协调方法、附着装置易因过约束导致失稳的问题。
前不久,来自北京航空航天大学机械学院的研究人员再次对上述难题发起挑战。受甲虫跗节链、攀禽爪手、哺乳动物蹄部的形态-结构-功能的启发,该研究团队提出了基于融合仿生和机械智能的机器人创新设计方法,同时提出了基于整体惯性中心动力学模型和附着力优化分配的攀爬机器人控制方法。
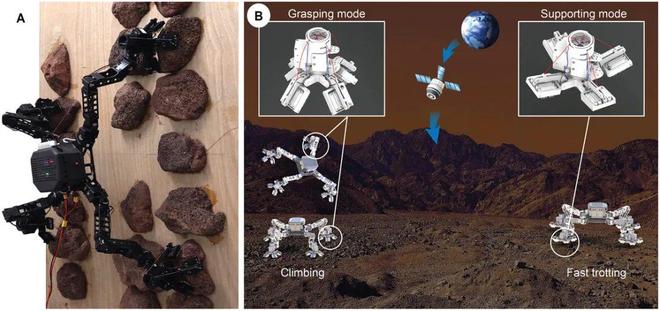
基于上述方法,研究团队设计了一种集附着与支撑功能于一体的多模态自适应攀岩爪手。该抓手具有附着周期短、负载自重比大、表面适应性强的优点。在此基础上,研究团队还设计了一种可针对不同地形与倾角灵活切换模式的攀爬机器人机构构型,提高了机器人的攀附和地形适应能力。其提出的攀爬机器人控制方法也有效降低了机器人的扰动内力,提高了攀附运动的成功率和效率。最终,研究团队成功研制出多模态自适应攀岩机器人(multimodal and adaptive rock-climbing robot,简称MARCBot,如视频 1和图1所示),实现了在重力环境下稳定攀爬垂直岩石表面,和在多种复杂地形的动态小跑。
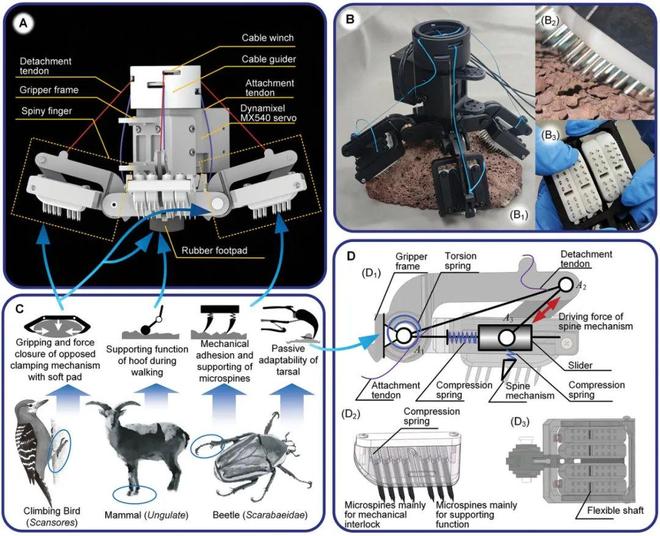
针对当前附着装置对岩石形状适应能力有限、无法同时满足快速行走与攀爬需求等问题,研究团队提出了基于融合仿生的机器人创新设计方法(融合仿生设计,其可理解为对不同生物体的运动机制和形态功能的整合,或融合不同生物学原理应用于工程设计,以实现更佳的功能和性能),并借鉴甲虫跗节链、攀禽爪手、哺乳动物蹄部的形态-结构,设计了具有附着-支撑功能的半被动、自适应的爪刺式攀岩爪手(A semi-passively actuated, structure-adaptive, and spiny gripper,简称SPASAS gripper)。
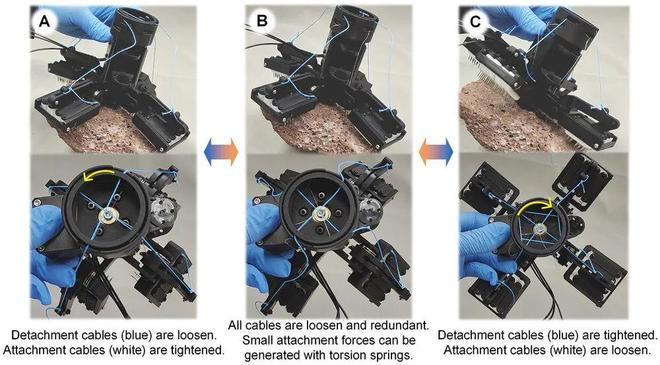
爪手通过主/被动结合的附着方式,仅使用单电机且无需复杂控制便可适应复杂表面形貌。其具有的多模态、快速附着、适应性与附着力强的特点,在自重仅为0.394 kg的情况下,在玄武岩完成附着后可产生至少49.05 N的切向附着力和43.71 N的法向附着力,提高了此类攀岩机器人的附着和地形适应能力。
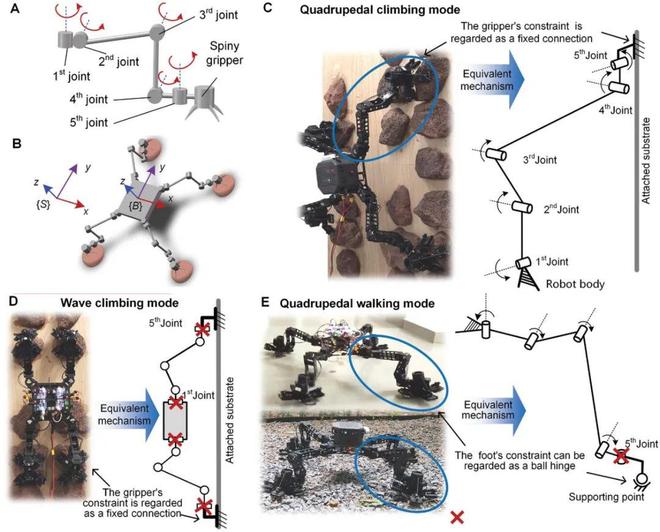
基于附着装置的多模态属性,研究团队利用对仿爬行动物四足构型的演变和基于旋量理论的运动学分析,设计了可实现自由攀爬和多运动模态的攀岩机器人机构构型,其具备类四肢动物攀爬、波动攀爬和类四足动物行走三种运动模态(如图5所示),可针对不同地形与倾角切换模态,提高了机器人的地形适应能力和运动效率,解决了此类机器人沉重复杂、不兼具稳定攀附和快速行进能力的问题。
针对攀岩机器人柔顺性不足、附着装置易因过约束导致失稳的问题,研究团队基于整体惯性中心动力学模型,综合考量机器人的稳定裕度与附着力分配方法,提出了一种攀爬机器人的准全身控制方法(quasi-whole-body control, Q-WBC)。
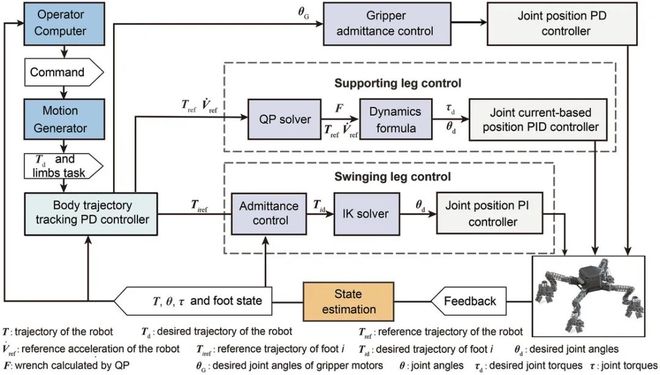
通过采用如图6所示的分层级和分布式的控制策略,研究团队将攀岩机器人的复杂控制系统拆解为多模块和子问题并逐一将其解决,其中主要包括机身轨迹追踪控制、爪手导纳控制、摆动腿基于逆运动学的控制、支撑腿基于附着力优化的平衡控制、底层关节基于电流的PID控制和状态估计等子模块,从而减小机器人的内力,避免单一附着装置承受过大载荷导致的失效。根据附着装置系统的刚度特性,对其在非抓持和抓持状态进行变刚度控制,并结合摆动腿的导纳控制实现对高低起伏地形的自适应盲走步态,研究团队降低了建模的复杂度和计算成本。
鉴于本研究主要服务深空探测需求,面向月球、火星等岩石星体探测任务,因此研究团队对机器人进行了面向平原地形的复杂地形快速小跑实验,以及面向月球或火星的环形山、火山、峡谷地形的攀爬运动实验,其中70°攀爬主要面向陡坡,而90°攀爬面向悬崖等极端地形。
研究团队在重力下对MARCBot进行了平地快速移动和攀岩测试,其可完成在多种复杂环境的对角小跑,速度达214 mm/s,是同类攀爬机器人中唯一具备此功能的样机。图8展示了机器人采用SPASAS gripper作为足端(图8A)与普通球状足(图8B)作为足端的行走对照实验,结果表明SPASAS gripper显著减小了机器人在草地、沙地、碎石等地形上的机身姿态误差和摆动幅度,提高了机器人在附着地形行走的稳定性。
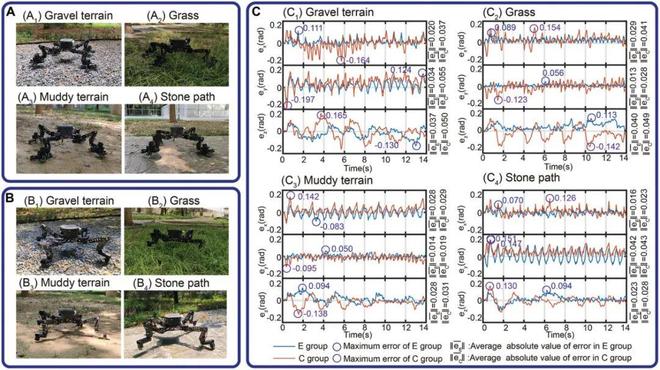
图8机器人以SPASAS爪手作为足端(E group)和橡胶足(C group)在多种复杂地形运动的对比
MARCBot在70°斜面的攀爬速度达到0.22 m/min(归一化速度为1.10 /min),过程如视频2所示。在90°垂直面的攀爬速度达到0.15 m/min(归一化速度0.73 /min),过程如视频3所示。相较闭环运动学控制和虚拟模型控制,研究团队提出的控制方法将CoT分别减小了20.03%和6.05%(如图9所示),且使用所对比的两种方法仅能完成70°表面攀爬,无法完成90°表面攀爬。
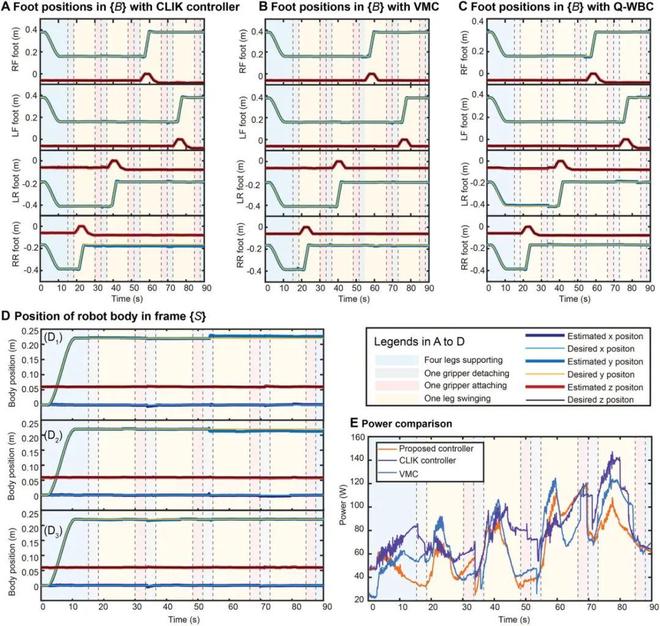
图9 采用本文所提出的Q-WBC控制方法与闭环运动学控制(CLIK)、虚拟模型控制(VMC)方法的对比。
研究团队面向星球探测、野外作业和科学考察等任务设计的MARCBot四足攀岩机器人,其配备的SPASAS爪手具有附着时间短、附着力大和表面适应性强等优点。MARCBot可在不更换末端执行器的情况下,通过切换模式来实现在平坦地面上的快速移动和在垂直及倾斜岩面上的稳定攀爬,这提高了机器人的地形适应性。同时,研究团队首次在四足机器人复杂地形小跑中使用了仿生爪刺机构,带有橡足垫的SPASAS gripper具有支撑和防滑功能,通过增加机器人的实际支撑面积,进一步增强了四足机器人在复杂地形表面上的运动稳定性。
研究团队提出的基于攀爬机器人动力学模型的Q-WBC控制方法,可优化爪手间的附着力分配,提高了机器人对外部环境的柔顺性和适应性,减少了攀爬机器人的内力扰动,还可避免应力集中到某一爪手导致的附着失败,提高了机器人攀爬步态的成功率。此外,与仅使用闭环运动学控制、虚拟模型控制控制算法相比,该方法还减少了机器人在攀爬过程中的总能耗和关节的峰值功率。
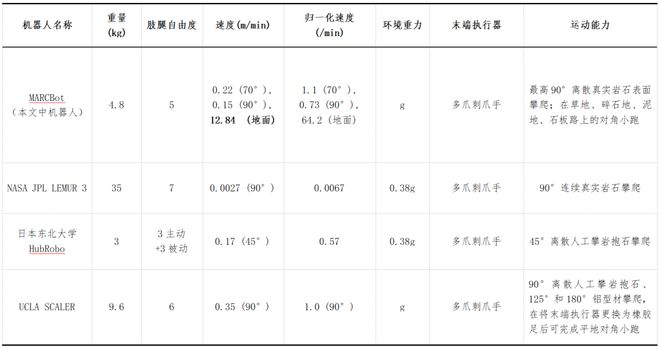
表1为MARCBot与其他攀岩机器人的对比,MARCBot具有更好的地形适应能力,其无需更换末端执行器即可在各种复杂地形中移动,在攀爬重力和速度方面也展现出先进水平,表明该研究成果在机器人的野外作业以及星球探测领域具有广阔应用前景。
特别声明:以上内容(如有图片或视频亦包括在内)为自媒体平台“网易号”用户上传并发布,本平台仅提供信息存储服务。
你敢信吗?一群老外看完《南京照相馆》,当场破口大骂,凭什么这种片子不早点放出来!
知名女星赵薇突发!北京法院出手,被冻结1590万股权,跟着大佬混的赵薇不断遭打击,在A股割韭菜已遭市场禁入,演艺事业也被封杀
美国工程师在华人公司干了4年,彻底崩溃:下午5点发急活,早上8点要结果!
立德机器人平台,是一个集媒体品牌、智库咨询、投资孵化、引智招商为一体的机器人垂直领域服务平台
被收39%高关税 瑞士联邦主席:特朗普在最后通线岁男孩哭诉被冤枉跳楼坠亡 物业及3个孩子被判赔60万
被收39%高关税 瑞士联邦主席:特朗普在最后通线岁男孩哭诉被冤枉跳楼坠亡 物业及3个孩子被判赔60万
9950X3D 并非终点:AMD 被曝将推 192MB L3 缓存 Zen 5 AM5 CPU
努比亚Z80 Ultra浮出水面:1.5K无孔屏再升级,远摄续航双突破
苹果超薄新机iPhone 17 Air电池外观曝光,厚度仅2.49毫米!
小米16 Ultra影像配置曝光:连续光变+1英寸主摄,或下放至Pro版


